Echolocalizator from Hamilton Mestizo on Vimeo.
Wednesday, September 9, 2015
Thursday, June 11, 2015
resumen / abstract
Con este prototipo se pretende reflexionar acerca de la tecnología como parte de la evolución del hombre y lo digital y/o virtual como una herramienta que transforma la realidad sensible para ofrecer otras maneras de interacción y compresión del mundo y sus fenómenos. La propuesta parte de la pregunta sobre el cómo los seres vivos ven y construyen su propia noción de realidad, pensando en dispositivos análogos y digitales que permitan experimentar, así sea de forma simulada, esas nociones o crear nuevas a partir de las herramientas tecnológicas. En este momento la computación puede ofrecer de forma muy rica este tipo de experiencias en una “realidad virtualizada” donde los fenómenos visibles o invisibles del mundo adquieren otros matices en la experiencia de interacción con el espacio a través de sistemas de retroalimentación.
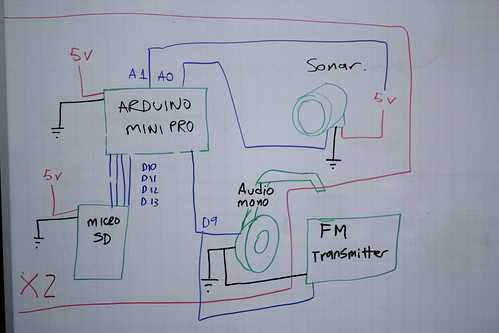
Es un wearable que permite a los humanos tener una experiencia diferente de percepción del espacio (eco-localización). Se trata de un artefacto electrónico basado en la forma en que algunos animales, como los murciélagos, perciben la realidad: a partir del ultrasonido. Para este prototipo se han usado dos sonares de corta distancia (645 cms, max) instalados alrededor de casco. Por medio de microcontroladores (arduino mini pro) se ejecuta un programa que navega, con base en la señales de los sonares, en archivos de audio almacenados en memorias (microSD). Esto permite navegar en un espacio a través de una experiencia de sonido bineural (simulado), y transmitido por radio FM (87.9 mhz)
--------------------
Echolocalizator is a prototype aiming to reflect on technology as an essential part of evolution in humanity and digital-virtual technology as a tool that modifies sensibility by creating different ways to interact with the real world and its phenomena. This proposal stems from questioning how living forms build their own notions of reality and how digital or analog devices that can simulate those notions or create alternative ones. Nowadays computing is capable of recreating virtual environments in a “virtualized reality” where visible and invisible phenomena of reality sense through cybernetic-hybrid systems.
Echolocalizator is a leather helmet that one can wear as a simulating tool perceiving as some animals do through echo-localization. For example, bats and dolphins use an inaudible ultrasonic sound and its echo to navigate in space. The wearable instrument we are proposing uses sonars based to the left and right of the forehead. A couple of microcontrollers translate the incoming signals into centimeters based on the distance between the object and the sonar, ranging from 10 to 650cms. Sensor references command two monophonic audio-tracks which are looping specific sounds from Sd-Cards. The result is a binaural-spatial experience using stereo left and right channels depending on the signal of the two sensors located in two different positions.
Es un wearable que permite a los humanos tener una experiencia diferente de percepción del espacio (eco-localización). Se trata de un artefacto electrónico basado en la forma en que algunos animales, como los murciélagos, perciben la realidad: a partir del ultrasonido. Para este prototipo se han usado dos sonares de corta distancia (645 cms, max) instalados alrededor de casco. Por medio de microcontroladores (arduino mini pro) se ejecuta un programa que navega, con base en la señales de los sonares, en archivos de audio almacenados en memorias (microSD). Esto permite navegar en un espacio a través de una experiencia de sonido bineural (simulado), y transmitido por radio FM (87.9 mhz)
--------------------
Echolocalizator is a prototype aiming to reflect on technology as an essential part of evolution in humanity and digital-virtual technology as a tool that modifies sensibility by creating different ways to interact with the real world and its phenomena. This proposal stems from questioning how living forms build their own notions of reality and how digital or analog devices that can simulate those notions or create alternative ones. Nowadays computing is capable of recreating virtual environments in a “virtualized reality” where visible and invisible phenomena of reality sense through cybernetic-hybrid systems.
Echolocalizator is a leather helmet that one can wear as a simulating tool perceiving as some animals do through echo-localization. For example, bats and dolphins use an inaudible ultrasonic sound and its echo to navigate in space. The wearable instrument we are proposing uses sonars based to the left and right of the forehead. A couple of microcontrollers translate the incoming signals into centimeters based on the distance between the object and the sonar, ranging from 10 to 650cms. Sensor references command two monophonic audio-tracks which are looping specific sounds from Sd-Cards. The result is a binaural-spatial experience using stereo left and right channels depending on the signal of the two sensors located in two different positions.
Tuesday, April 28, 2015
Muestra #imagenfest2015 / exhibition
La 14 versión del Festival Internacional de la Imagen fue celebrado en la ciudad de Manizales Colombia, durante el 20 al 25 de abril de 2015. Este prototipo fue parte del festival como presentación del proceso de la residencia de diseño y creación. Durante el festival asistentes y público en general pudo observar, escuchar e interactuar con el casco.
-----
The 14th version of International Festival of the Image had celebrated in the city of Manizales Colombia during April 20 to 25, 2015. This mock-up was part of the festival as in an exhibition of process of the residency design+creation. During the festival assistants and public could take a look, listen and interact with the helmet.
 .
.


 .
. .
.


-----
The 14th version of International Festival of the Image had celebrated in the city of Manizales Colombia during April 20 to 25, 2015. This mock-up was part of the festival as in an exhibition of process of the residency design+creation. During the festival assistants and public could take a look, listen and interact with the helmet.
...
prueba de sonido / trying sound
El sonidos es un parte importante de este prototipo. El objetivos es generar una experiencia de navegación por el espacio usando efectos sonoros y musicales. En este primer experimento hemos usados tonos y frecuencias como parte de percibir el espacio tridimensional donde tonos altos y frecuencias rápidas son usadas para detectar objetos cercanos y tonos bajos y frecuencias lentas para objetos lejanos. Los sonidos fueron grabados con la ayuda de Juan Pablo Yepes de LASO en la Universidad de Caldas.
-----
The sound is an important piece of this prototype. The aim is to generate an experience navigating in the space using sound and musical effects. For this first experiment we used tone and frequency as part of listening to sense the 3d space where high tones and quickly frequencies are using to detect close objects and, by contrast, low tones and slowly frequencies far objects. It was recorded with the help of Juan Pablo Yepes from LASO at Caldas University.



-----
The sound is an important piece of this prototype. The aim is to generate an experience navigating in the space using sound and musical effects. For this first experiment we used tone and frequency as part of listening to sense the 3d space where high tones and quickly frequencies are using to detect close objects and, by contrast, low tones and slowly frequencies far objects. It was recorded with the help of Juan Pablo Yepes from LASO at Caldas University.
Saturday, April 18, 2015
wearable
Con la ayuda de "Álter máscaras y sombreros" en el diseño y una zapatería local en la confección terminamos de ensamblar el casco, adaptando los respectivos componentes electrónicos. Ahora paso a la segunda etapa del proyecto, a experimentar con los sonidos.
-----
With the help of "Álter máscaras y sombreros" in the designing and a local footwear factory in the manufactory we have finished to assemble the helmet, adjusting the electronics. Suddenly I will start up the second part of the project, to experiment with the sound.

-----
With the help of "Álter máscaras y sombreros" in the designing and a local footwear factory in the manufactory we have finished to assemble the helmet, adjusting the electronics. Suddenly I will start up the second part of the project, to experiment with the sound.




Wednesday, April 15, 2015
prototipando ando / prototyping
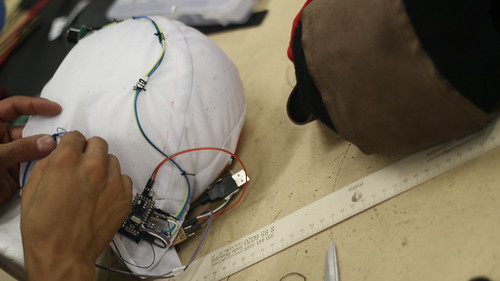
Hemos empezado a modelar el wearable basados en el estilo de los cascos de aviación de principios del siglo XX. Los componentes electrónicos fueron situados en este primer prototipo de tela.
----
We have started up modelling the wearable, based on the early 1900's aviator helmet style. Electronic components are placed in this first fabric mock-up.



----
We have started up modelling the wearable, based on the early 1900's aviator helmet style. Electronic components are placed in this first fabric mock-up.
Monday, April 13, 2015
Sistema / system
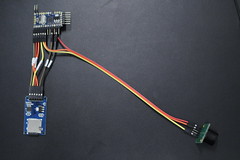
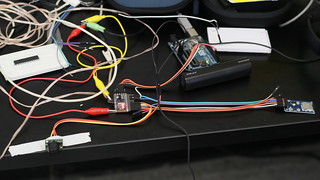
He Integrado todos los componentes en un simple circuito electrónico. La mente del sistema es un Arduino micro el cual ejecuta un programa asociando el señal del sonar con un archivo de audio (WAV) guardado en la microSD. El resultado es un señal de audio monofónica que corresponde directamente con la distancia detectada por el sonar. En esta prueba la resolución es de 10cms en una rango de un metro (10 diferentes señales de audio).
-------
I have integrated all components in a simple electric circuit. The mind of the system is an Arduino mini pro which ejecutes a program to associate the sonar signal with an audio file (WAV) stored in the microSD. The result is a monophonic audio signal which corresponds directly with the distance detected by the sonar. In this probe the resolution is the 10cms in the range of 100cms (10 different audio output).
CÓDIGO / CODE
#include <SdFat.h>
SdFat sd;
#include "Maxbotix.h"
#define SD_ChipSelectPin 10
#include <TMRpcm.h>
#include <SPI.h>
int data;
//char track = "track4.wav";
TMRpcm audio;
Maxbotix rangeSensorAD(A0, Maxbotix::AN, Maxbotix::LV, Maxbotix::BEST,9);
void setup(){
audio.speakerPin = 9;
pinMode(10,OUTPUT);
Serial.begin(9600);
if (!sd.begin(10, SPI_HALF_SPEED)) {Serial.println("Something wrong"); return;
}else{ Serial.println("SD OK"); }
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
digitalWrite(A1, 1);
digitalWrite(A2, 0);
}
void loop(){
data=rangeSensorAD.getRange();
//audio.play("track4.wav",random(0,20)); delay(1000);
Serial.println(data);
//1m
if(data<=13){
audio.play("track.wav",1);delay(1000); audio.pause();
}
if(data>14&&data<20){
audio.play("track.wav",2);delay(1000); audio.pause();
}
if(data>21&&data<30){
audio.play("track.wav",3);delay(1000); audio.pause();
}
if(data>31&&data<40){
audio.play("track.wav",4);delay(1000); audio.pause();
}
if(data>41&&data<50){
audio.play("track.wav",5);delay(1000); audio.pause();
}
if(data>51&&data<60){
audio.play("track.wav",6);delay(1000); audio.pause();
}
if(data>61&&data<70){
audio.play("track.wav",7);delay(1000); audio.pause();
}
if(data>71&&data<80){
audio.play("track.wav",8);delay(1000); audio.pause();
}
if(data>81&&data<90){
audio.play("track.wav",9);delay(1000); audio.pause();
}
if(data>91&&data<100){
audio.play("track.wav",10);delay(1000); audio.pause();
}
}
-------
I have integrated all components in a simple electric circuit. The mind of the system is an Arduino mini pro which ejecutes a program to associate the sonar signal with an audio file (WAV) stored in the microSD. The result is a monophonic audio signal which corresponds directly with the distance detected by the sonar. In this probe the resolution is the 10cms in the range of 100cms (10 different audio output).
CÓDIGO / CODE
#include <SdFat.h>
SdFat sd;
#include "Maxbotix.h"
#define SD_ChipSelectPin 10
#include <TMRpcm.h>
#include <SPI.h>
int data;
//char track = "track4.wav";
TMRpcm audio;
Maxbotix rangeSensorAD(A0, Maxbotix::AN, Maxbotix::LV, Maxbotix::BEST,9);
void setup(){
audio.speakerPin = 9;
pinMode(10,OUTPUT);
Serial.begin(9600);
if (!sd.begin(10, SPI_HALF_SPEED)) {Serial.println("Something wrong"); return;
}else{ Serial.println("SD OK"); }
pinMode(A1, OUTPUT);
pinMode(A2, OUTPUT);
digitalWrite(A1, 1);
digitalWrite(A2, 0);
}
void loop(){
data=rangeSensorAD.getRange();
//audio.play("track4.wav",random(0,20)); delay(1000);
Serial.println(data);
//1m
if(data<=13){
audio.play("track.wav",1);delay(1000); audio.pause();
}
if(data>14&&data<20){
audio.play("track.wav",2);delay(1000); audio.pause();
}
if(data>21&&data<30){
audio.play("track.wav",3);delay(1000); audio.pause();
}
if(data>31&&data<40){
audio.play("track.wav",4);delay(1000); audio.pause();
}
if(data>41&&data<50){
audio.play("track.wav",5);delay(1000); audio.pause();
}
if(data>51&&data<60){
audio.play("track.wav",6);delay(1000); audio.pause();
}
if(data>61&&data<70){
audio.play("track.wav",7);delay(1000); audio.pause();
}
if(data>71&&data<80){
audio.play("track.wav",8);delay(1000); audio.pause();
}
if(data>81&&data<90){
audio.play("track.wav",9);delay(1000); audio.pause();
}
if(data>91&&data<100){
audio.play("track.wav",10);delay(1000); audio.pause();
}
}
Subscribe to:
Comments (Atom)